Archive
Please Do Not Disturb
When a control system is humming along, the gap between the desired and current states is so small that the frequency of command issuance by the Decision Maker component is essentially zero; all is well and goal attainment is on track. However, with the universe being as messy as it is, unseen and unpredictable “disturbances” can, and do, enter the system at any point of access to the structure.
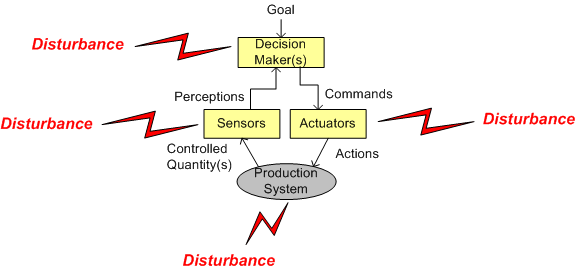
If the sensors and/or actuators can’t filter out the disturbances or are malfunctioning themselves, then true control of the production system may be lost. Perceptions and commands get distorted and the distance between goal attainment and “reality” will be perceived as shorter or longer than they are. D’oh! I hate when that happens.
Who’s Controlling The Controller?
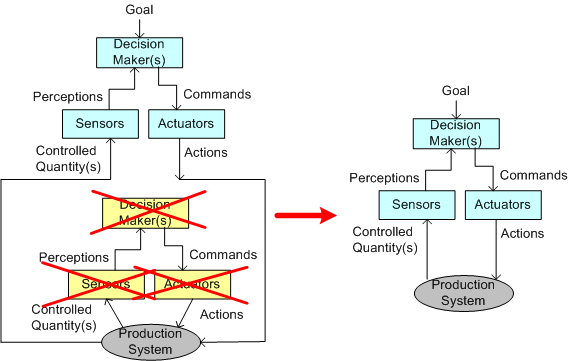
The figure below models a centralized control system in accordance with Bill Powers’ Perceptual Control Theory (PCT).
Given 1: a goal to achieve, and 2: the current perceived state of the production system, the decision-making apparatus issues commands it presumes will (in a timely fashion) narrow the gap between the desired goal and the current system state.
But wait! Where does the goal come from, or, in cybernetics lingo, “who’s controlling the controller?” After all, the entity’s perceptions, commands, actions, and controlled quantity signals all have identifiable sources in the model. Why doesn’t the goal have a source? Why is it left dangling in an otherwise complete model?
Abstraction is selective ignorance – Andrew Koenig
Well, as Bill Clinton would say, “it depends“. In the case of an isolated system (if there actually is such a thing), the goal source is the same as the goal target: the decision-maker itself. Ahhhh, such freedom.
On the other hand, if our little autonomous control system is embedded within a larger hierarchical control system, then the goal of the parent system decision maker takes precedence over the goal of the child decision maker. In the eyes of its parent, the child decision maker is the parent’s very own virtual production subsystem be-otch.
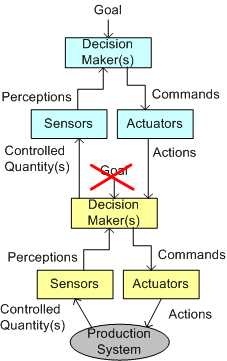
To the extent that the parent and child decision maker’s goals align, the “real” production system at the bottom of the hierarchy will attempt to achieve the goal set by the parent decision maker. If they are misaligned, then unless the parent interfaces some of its own actuator and sensor resources directly to the real production system, the production system will continue to do the child decision maker’s bidding. The other option the parent system has is to evict its child decision maker subsystem from the premises and take direct control of the production system. D’oh! I hate when that happens.
It’s What We Do
Error correction is what we are doing every instant of our lives – John Gall (The Systems Bible, P84)
OMG! Mr. Gall’s wisdom is spot on with William T. Powers‘ PCT, which in effect states that:
We are a mysterious stacked aggregate of thousands of little control systems acting continuously on our environment in a manner which corrects errors between what we desire and what is. (BD00 via William Powers)
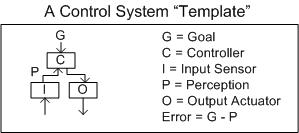
Need some dorky picture to visualize the undecipherable message? For context, try this one first:
Next try this model of “us” (actually, anything that’s alive):
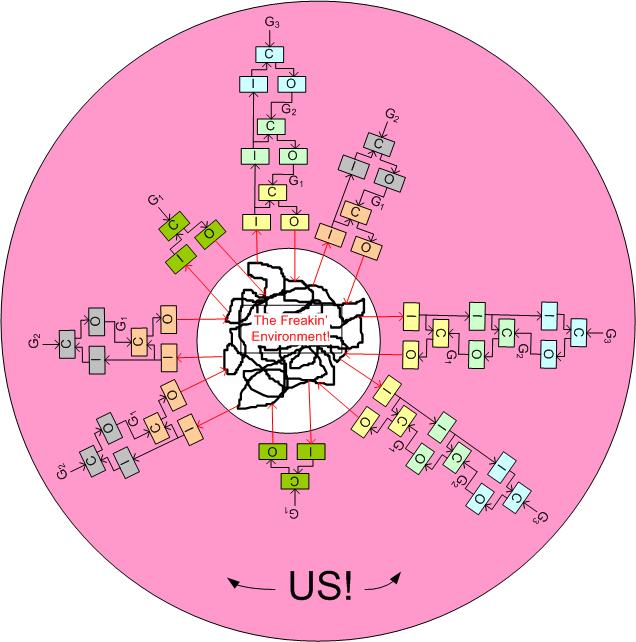
When we go to sleep, our conscious mental control system building blocks temporarily go dormant. However, those at the periphery of the stack which directly penetrate the physical “us/environment” boundary never sleep – because the environment never sleeps. These unsung workhorse heroes at the bottom of the hierarchy symphonically collaborate to keep our blood pressure, temperature, breathing, heart beat, etc, within some preset genetic limits so that we can wake up the next morning! And the little buggers do this by…. continuously correcting for errors between what the bazillion “controlled variables” are and what they should be. Error correction is what we do.
Note that without nature’s loving cooperation in keeping the variations in the environment within the controllable limits of our little friends, we wouldn’t be here now – we wouldn’t have even “begun“. What a joyous and miraculous dance of life, no?
So, the next time someone asks you what you do for a living, tell them that you correct errors.
Related articles
- Command Vs. Control (bulldozer00.com)
- Bankrupt Models (bulldozer00.com)
- From The Ground Up (bulldozer00.com)
- Cross-Disciplinary Pariahs (bulldozer00.com)
- Normal, Slave, Almost Dead, Wimp, Unstable (bulldozer00.com)
- Extrapolation, Abstraction, Modeling (bulldozer00.com)
- Nine Plus Levels (bulldozer00.com)
Man-Made And Person-Specific
George Pransky taught (err, finally convinced) BD00 that all stress is man-made and person-specific. One person’s stress is another’s exhilaration. Nevertheless, environmental and situational factors probably do influence stress levels to some extent, no?
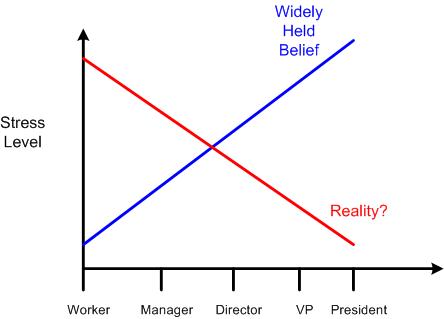
One would think that as one ascends the ladder in a hierarchical institution, his/her stress levels increase with rank, stature, and responsibility. This may be true in general, but there is some research evidence to the contrary:
No Sweat: Less Stress in Higher Ranks. “..this study suggests that those who manage others actually experience less stress — as measured through both biological and psychological assessments — than non-leaders. In fact, the stress level seems to go down as executives climb up the corporate ladder. Leaders with more authority, and more freedom to delegate day-to-day oversight, do better on this front than managers below them.”
The Whitehall Study. “The Whitehall cohort studies found a strong association between grade levels of civil servant employment and mortality rates from a range of causes. Men in the lowest grade (messengers, doorkeepers, etc.) had a mortality rate three times higher than that of men in the highest grade (administrators).”
It all comes down to “control“. If you believe (like BD00 does) in William T. Powers’ Perceptual Control Theory (that every living being is an aggregation of thousands of little control systems interconnected for the purpose of achieving prosperous survival), then the results make sense. It’s simply that people in the higher ranks have more “control” over their environment than those below them.
Of course, take this post (along with all other BD00 posts) with a carafe of salt. He likes to make up stuff that confirms his UCB by carefully stitching together corroborating evidence while filtering out all disconfirmatory evidence. But wait! You do that too, no?
Every man, wherever he goes, is encompassed by a cloud of comforting convictions, which move with him like flies on a summer day. – Bertrand Russell
Command Vs. Control
One of the acronyms in BD00’s evil glossary is “CCH“. It stands for “Command and Control Hierarchy” because BD00 thought that command and control were fused together like Forrest Gump‘s peas and carrots. However, In “Making Sense Of Behavior“, Bill Powers distinguishes between a command hierarchy and a control hierarchy in an interesting way.
In a command hierarchy, a command dictates a specific action (git ‘r done!). In a control hierarchy, a command is a reference signal that specifies the state in which a particular perception is desired to be at in a future point in time; a vision, if you will.
For example, a sequence controlling system doesn’t order the limbs to be in a particular configuration; it tells a lower level control system to perceive the limbs as being in a particular position, then another, then another. By receiving a less specific reference signal, the lower level position control system can compensate for unforeseen disturbances (wind, gravity, physical obstructions) without distracting the higher level control system from its purpose.

Bankrupt Models
In his paper, “The Dispute Over Control Theory“, Bill Powers tries to clarify how Perceptual Control Theory (PCT) differs from the two main causal approaches to psychology: stimulus-response and command-response. In order to gain a deeper understanding of PCT, I’m gonna try to reproduce Bill’s argument in this post with my own words and pictures.
The figure below represents a PCT unit of behavioral organization, the Feedback Control System (FCS). An FCS is a closed loop with not one independent input (e.g. stimulus or command), but two. One input, the reference signal, is sourced from the output function of a higher level control unit(s). The second input, an amalgam of environmental disturbances, “invades” the loop from outside the organism. Both inputs act on the closed loop as a whole and the purpose of the FCS is to continuously act on the environment (via muscular exertion) to maintain the perceptual signal as close to the reference signal as possible. As the reference changes, the behavior changes. As the disturbance changes, the behavior changes. Since action is behavior, the FCS exhibits behavior to control perception; behavior is the control of perception.

The figure below depicts models of the stimulus-response and command-response views in terms of the PCT FCS. The foremost feature to notice is that there is no loop in either model – it’s broken. The second major difference is that neither model has two inputs.

In the Stimulus-Response model, the linear, causal path of action is: Stimulus (a.k.a Disturbance) ->Organism->Behavior. In the Command-Response model, the linear, causal path of action is: Command (a.k.a Reference)->Organism->Behavior. Hence, the models can be reduced to these simple (and bankrupt) renderings of a dumb-ass organism totally under the control of “something in the external environment“:

So, you may ask: “How could our best and brightest minds in psychology and sociology gotten it so wrong for so long; and why don’t they embrace PCT to learn how living systems really tic?” It’s because they erroneously applied Newton’s linear cause-effect approach for the physics of inanimate objects to living beings and they’ve thoroughly crystallized their UCBs into cement bunkers.
When you push a rock, there is no internal resistance from the rock and Newton’s laws kick into action. When you push a human being, you’ll encounter internal resistance and Newton’s laws don’t apply – control theory applies.
Compounding the difficulty has been a surprising tendency for scientists who are normally careful to know what they are talking about to leap to intuitive conclusions about the properties and capabilities of control systems, without first having become personally acquainted with the existing state of theart. If any criticism is warranted, it is for promulgating statements with an authoritative air without having verified personally that they are justified. – Bill Powers
D’oh! BD00 takes major offense at Bill’s last sentence.
Related articles
- Normal, Slave, Almost Dead, Wimp, Unstable (bulldozer00.com)
- Nine Plus Levels (bulldozer00.com)
- Cross-Disciplinary Pariahs (bulldozer00.com)
- Extrapolation, Abstraction, Modeling (bulldozer00.com)
- Shall And Shall Not (bulldozer00.com)
From The Ground Up
In developing their feedback control system-based models (see below) for exploring the nature of human behavior, both Bill Powers and Rudy Starkermann really did start from the ground up.

By “the ground up“, I mean that their theories started with the basic building blocks of the brain and nervous system. The diagram below shows examples of Powers’s and Starkermann’s underlying neuronal models.

Unlike classical Skinnerian “behaviorists“, whose theories are founded on more abstract, “black box”, empirical findings, BD00 believes that Bill and Rudy’s theories are much more closer to the “truth” (whatever the hell that may be) behind what motivates human behavior. What do you think?
Related articles
- Cross-Disciplinary Pariahs (bulldozer00.com)
- Building The Perfect Beast (bulldozer00.com)
- Nine Plus Levels (bulldozer00.com)
Cross-Disciplinary Pariahs
The figure below shows a simplified version of the classic engineering Feedback Control System (FCS). There are two significant features that distinguish an FCS from a typical engineering system. First, the input is not a raw signal to be manipulated in order to produce a derived output of added informational value. It is a “desired” setpoint (or goal, or reference) to be “achieved” by the system’s design.
The second feature is the feedback loop which taps off the output signal and provides real-time evidence to the comparator of how well the output is converging to (or diverging from) the desired setpoint. For a given application, the system’s innards are designed such that the output tracks its input with hi fidelity – even in the presence of “disturbances” (e.g. noise) that infiltrate the system.

In purely technical systems (as opposed to socio-technical systems), the FCS system output would typically be connected to an “actuator” device like a motor, a switch, a valve, a furnace, etc that affects an important measurable quantity in the external environment. The desired setpoints for these type of systems would be motor speed, switch position, valve position, and temperature, respectively. The mathematics of how engineering FCSs behave been known since the 1930s.
In defiance of mainstream psychology and sociology pedagogy, Bill Powers and Rudy Starkermann spent much of their careers applying control theory concepts to their own innovative theories of human behavior. Their heretical, cross-disciplinary approaches to psychology and sociology have kept them oppressed and out of the mainstream much like Deming, Ackoff, Argyris in management “science”.
The figure below shows (big simplifications of) the Powers and Starkermann models side by side. Note the similarities between them and also between them and the classic engineering FCS.
- Engineering FCS: Setpoint/Comparator/Feedback Loop
- Powers: Reference/Comparator/Feedback Loop
- Starkermann: Goal/Summing Node/Feedback Loop

The big (and it’s huge) difference between the Starkermann/Powers models and the engineering FCS model is that Starkermann’s goal and Powers’ reference signal originate from within the system whereas the dumb-ass engineering FCS must “be told” what the desired setpoint is by something outside of itself (a human or another mechanistic system designed by a human). In the Starkermann/Powers FCS models of human behavior, “being told” is processed as a disturbance.
If you delve deeper into the “obscure” work of Starkermann and Powers, your world view of the behavior of individuals and groups of individuals just may change – for the better or the worse.
Related articles
- Building The Perfect Beast (bulldozer00.com)
- Normal, Slave, Almost Dead, Wimp, Unstable (bulldozer00.com)
- 1, 2, X, Y (bulldozer00.com)
- The Dispute Over Control Theory (docs.google.com)
Normal, Slave, Almost Dead, Wimp, Unstable
Mr. William T. Powers is the creator (discoverer?) of “Perceptual Control Theory” (PCT). In a nutshell, PCT asserts that “behavior controls perception“. His idea is the exact opposite of the stubborn, entrenched, behaviorist mindset which auto-assumes that “perception controls behavior“.
This (PCT) interpretation of behavior is not like any conventional one. Once understood, it seems to match the phenomena of behavior in an effortless way. Before the match can be seen, however, certain phenomena must be recognized. As is true for all theories, phenomena are shaped by theories as much as theories are shaped by phenomena. – Bill Powers
On the Living Control Systems III web page, you can download software that contains 13 interactive demos of PCT in action:

The other day, I spent several hours experimenting with the “LiveBlock” demo in an attempt to understand PCT more deeply. When the demo is launched, the majority of the window is occupied by a fundamental, building-block feedback control system:

When the “Auto-Disturbance” radio option in the lower left corner is clicked to “on“, a multi-signal time trace below the model springs to life:

As you can see, while operating under stable, steady-state circumstances, the system does what it was designed to do. It purposefully and continuously changes its “observable” output behavior such that its internal (and thus, externally unobservable) perceptual signal tracks its internal reference signal (also externally unobservable) pretty closely – in spite of being continuously disturbed by “something on the outside“. When the external disturbance is turned off, the real-time trace goes flat; as expected. The perceptual signal starts tracking the reference signal dead nutz on the money such that the difference between it and the reference is negligible:

The Sliders
Turning the disturbance signal “on/off” is not the only thing you can experiment with. When enabled via the control panel to the left of the model (not shown in the clip below), six parameter sliders are displayed:

So, let’s move some of those sliders to see how they affect the system’s operation.
The Slave
First, we’ll break the feedback loop by decreasing the “Feedback Gain” setting to zero:

Almost Dead
Next, let’s disable the input to the system by moving the “Input Gain” slider as far to the left as we can:

The Wimp
Next, let’s cripple the system’s output behavior by moving the “Output Gain” slider as far to the left as we can:

Let’s Go Unstable!
Finally, let’s first move the “Input Delay” slider to the right to decrease the response time and then subsequently move the “Output Time Constant” slider to the left to increase the reaction time:


So, what are you? Normal, a slave, almost dead, a wimp, or an unstable wacko (like BD00)?
I’ve always been pretty much a blue-collar type, by training and by preference. – Bill Powers
Related articles
- Nine Plus Levels (bulldozer00.com)
- Extrapolation, Abstraction, Modeling (bulldozer00.com)
Extrapolation, Abstraction, Modeling
In the beginning of his book, “Behavior: The Control Of Perception“, Bill Powers asserts that there are three ways of formulating a predictive theory of behavior: extrapolation, abstraction, and modeling.
Extrapolation and abstraction are premised on accumulating a collection observations of behaviors and ferreting out recurring patterns applicable under many contexts and input situations. Modeling goes one level deeper and is based on formulating an organizational structure of the internal mechanisms that cause the observed behaviors.

For 30 years prior to the discovery/development/refinement of control theory (and continuing on today because of entrenched mindsets), psychologists and sociologists formulated theories of behavior based on extrapolation and abstraction. Because the human nervous system and brain were (and still are) unfathomably complex, they didn’t even try to model any underlying mechanisms. They treated organisms as dumb-ass, purposeless, “black box” responders to stimuli.
Bill Powers didn’t accept the superficial approaches and black box conclusions of the social “sciences” crowd. He went deeper and turned opaque-black into transparent-white with the relentless modeling and testing of his control system hypothesis of behavior:

Note that in Bill’s model, there is an internal goal that determines the response to a given “disturbance“. Thus, given the same disturbance at two different points in time, the white box model can generate different responses whereas the black box model would always generate the same response.
For example, the white box model explains anomalies like why, on the 100th test run, a mouse won’t press a button to get a food pellet as it did on the 99 previous runs. In this case, the internal goal may be to “eat until satiated“. When the internal goal is achieved, the externally observed behavior changes because the stimulus is no longer important to the mouse.
Theories based on extrapolation and abstraction are useful for predicting short term actions and trends within a certain probability, but when a physical model of the underlying mechanisms of a phenomenon is discovered, it explains a lot of anomalies unaccounted for by extrapolation/abstraction.
For a taste of Mr. Powers’ control system-based theory of behavior, download and experiment with the software provided here: Living Control Systems III.
Who am I?
Why am I here?
WTF?
Meh!
D'oh!
My BTC Address

