Archive
Please Do Not Disturb
When a control system is humming along, the gap between the desired and current states is so small that the frequency of command issuance by the Decision Maker component is essentially zero; all is well and goal attainment is on track. However, with the universe being as messy as it is, unseen and unpredictable “disturbances” can, and do, enter the system at any point of access to the structure.
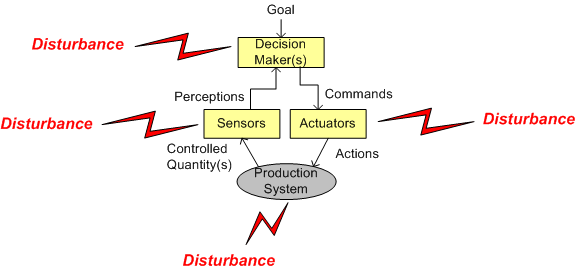
If the sensors and/or actuators can’t filter out the disturbances or are malfunctioning themselves, then true control of the production system may be lost. Perceptions and commands get distorted and the distance between goal attainment and “reality” will be perceived as shorter or longer than they are. D’oh! I hate when that happens.
Signals, Sensations, Perceptions, Commands, Actions!
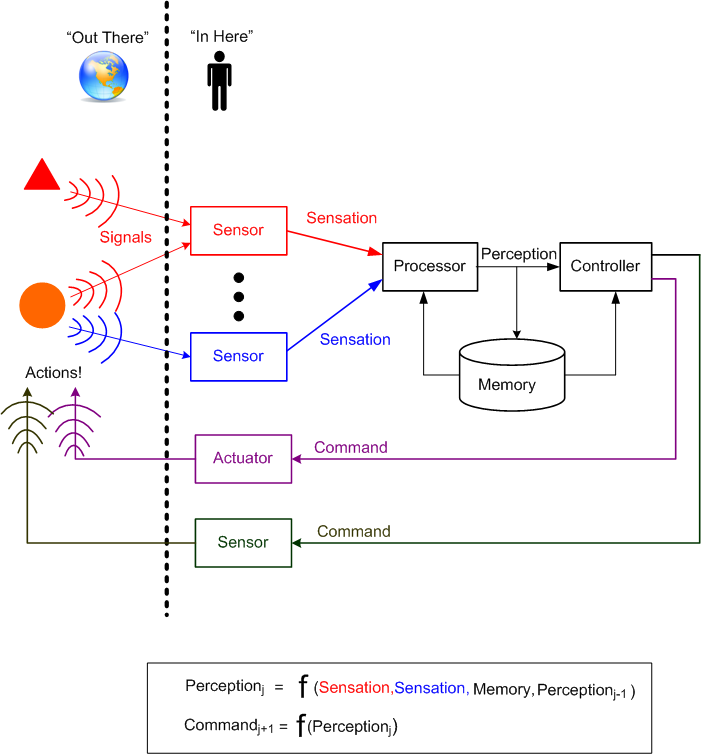
In humans, the sensors are the eyes, ears, nose, skin, and taste buds. The processor/memory/controller combo is the brain. The actuators are the muscles. Although not shown on the diagram, “commands” are also issued to the sensors. All inter-part communications “In Here” are manifested via neural currents.
Of course, this crap is all made up. It’s simply a cacophonous dump of what was in my tortured mind at the moment.
Who’s Controlling The Controller?
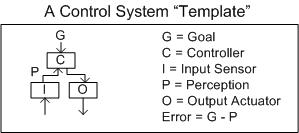
The figure below models a centralized control system in accordance with Bill Powers’ Perceptual Control Theory (PCT).
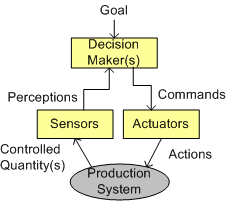
Given 1: a goal to achieve, and 2: the current perceived state of the production system, the decision-making apparatus issues commands it presumes will (in a timely fashion) narrow the gap between the desired goal and the current system state.
But wait! Where does the goal come from, or, in cybernetics lingo, “who’s controlling the controller?” After all, the entity’s perceptions, commands, actions, and controlled quantity signals all have identifiable sources in the model. Why doesn’t the goal have a source? Why is it left dangling in an otherwise complete model?
Abstraction is selective ignorance – Andrew Koenig
Well, as Bill Clinton would say, “it depends“. In the case of an isolated system (if there actually is such a thing), the goal source is the same as the goal target: the decision-maker itself. Ahhhh, such freedom.
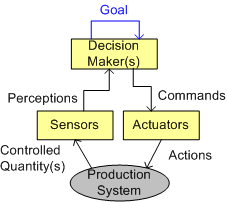
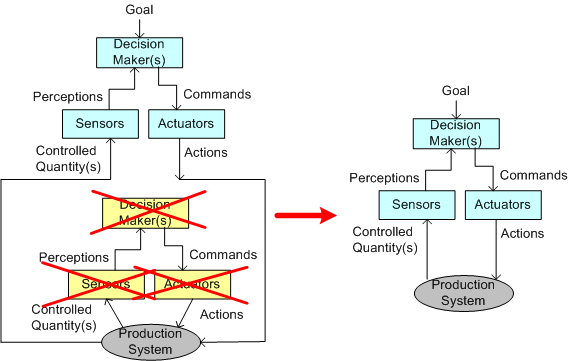
On the other hand, if our little autonomous control system is embedded within a larger hierarchical control system, then the goal of the parent system decision maker takes precedence over the goal of the child decision maker. In the eyes of its parent, the child decision maker is the parent’s very own virtual production subsystem be-otch.
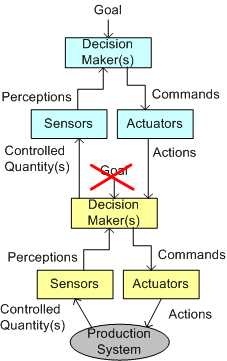
To the extent that the parent and child decision maker’s goals align, the “real” production system at the bottom of the hierarchy will attempt to achieve the goal set by the parent decision maker. If they are misaligned, then unless the parent interfaces some of its own actuator and sensor resources directly to the real production system, the production system will continue to do the child decision maker’s bidding. The other option the parent system has is to evict its child decision maker subsystem from the premises and take direct control of the production system. D’oh! I hate when that happens.
Effective, Incompetent, Coercive, Klueless
In any control system design, the accuracy of its input sensors, the force of its output actuators, the ability of its controllers to decide whether the system’s goals are being met, and the responsiveness (time lag) of all three of its parts determine its performance.
However, that’s not enough. All of the control system’s sensors and actuators must be actually interfaced to the controlled system in order for the controller + controllee supra-system to have any chance at meeting the goal supplied to (or by) the controller.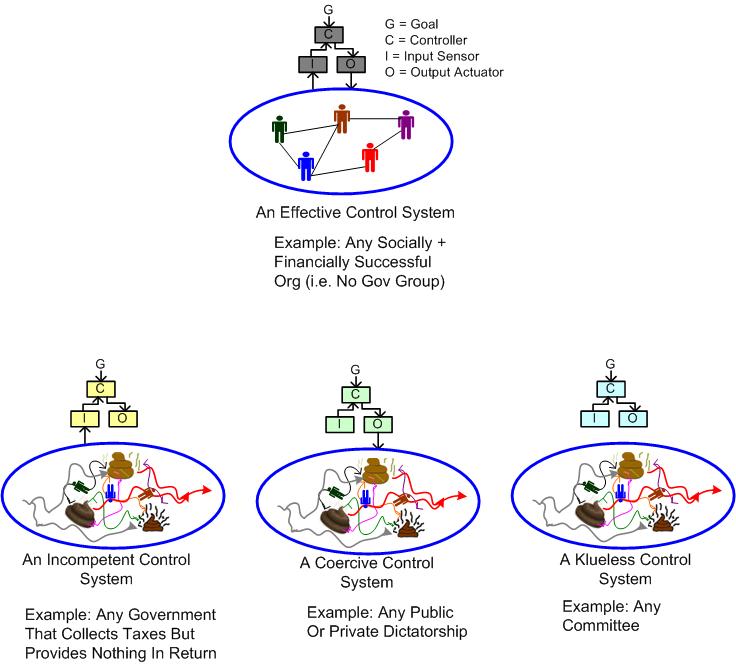
It’s What We Do
Error correction is what we are doing every instant of our lives – John Gall (The Systems Bible, P84)
OMG! Mr. Gall’s wisdom is spot on with William T. Powers‘ PCT, which in effect states that:
We are a mysterious stacked aggregate of thousands of little control systems acting continuously on our environment in a manner which corrects errors between what we desire and what is. (BD00 via William Powers)
Need some dorky picture to visualize the undecipherable message? For context, try this one first:
Next try this model of “us” (actually, anything that’s alive):
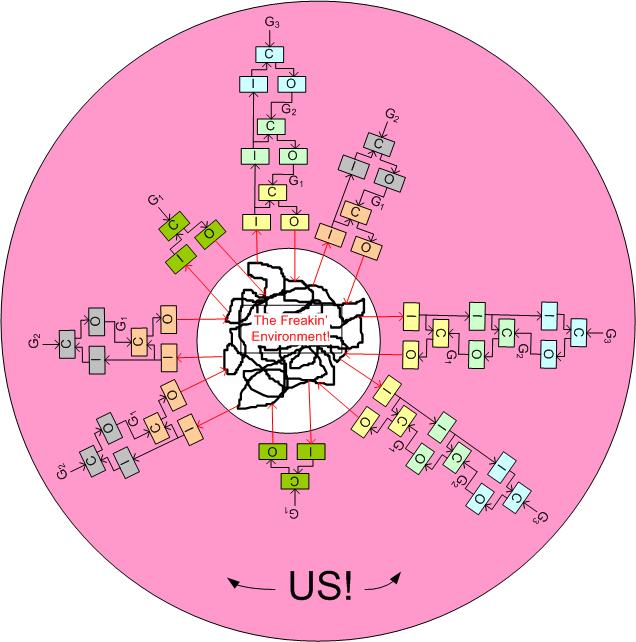
When we go to sleep, our conscious mental control system building blocks temporarily go dormant. However, those at the periphery of the stack which directly penetrate the physical “us/environment” boundary never sleep – because the environment never sleeps. These unsung workhorse heroes at the bottom of the hierarchy symphonically collaborate to keep our blood pressure, temperature, breathing, heart beat, etc, within some preset genetic limits so that we can wake up the next morning! And the little buggers do this by…. continuously correcting for errors between what the bazillion “controlled variables” are and what they should be. Error correction is what we do.
Note that without nature’s loving cooperation in keeping the variations in the environment within the controllable limits of our little friends, we wouldn’t be here now – we wouldn’t have even “begun“. What a joyous and miraculous dance of life, no?
So, the next time someone asks you what you do for a living, tell them that you correct errors.
Related articles
- Command Vs. Control (bulldozer00.com)
- Bankrupt Models (bulldozer00.com)
- From The Ground Up (bulldozer00.com)
- Cross-Disciplinary Pariahs (bulldozer00.com)
- Normal, Slave, Almost Dead, Wimp, Unstable (bulldozer00.com)
- Extrapolation, Abstraction, Modeling (bulldozer00.com)
- Nine Plus Levels (bulldozer00.com)
Man-Made And Person-Specific
George Pransky taught (err, finally convinced) BD00 that all stress is man-made and person-specific. One person’s stress is another’s exhilaration. Nevertheless, environmental and situational factors probably do influence stress levels to some extent, no?
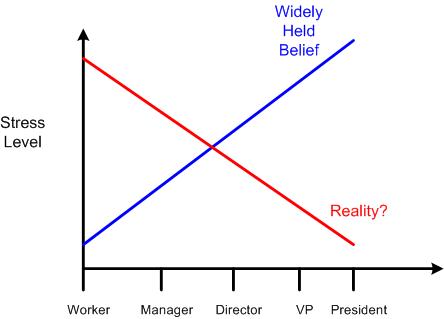
One would think that as one ascends the ladder in a hierarchical institution, his/her stress levels increase with rank, stature, and responsibility. This may be true in general, but there is some research evidence to the contrary:
No Sweat: Less Stress in Higher Ranks. “..this study suggests that those who manage others actually experience less stress — as measured through both biological and psychological assessments — than non-leaders. In fact, the stress level seems to go down as executives climb up the corporate ladder. Leaders with more authority, and more freedom to delegate day-to-day oversight, do better on this front than managers below them.”
The Whitehall Study. “The Whitehall cohort studies found a strong association between grade levels of civil servant employment and mortality rates from a range of causes. Men in the lowest grade (messengers, doorkeepers, etc.) had a mortality rate three times higher than that of men in the highest grade (administrators).”
It all comes down to “control“. If you believe (like BD00 does) in William T. Powers’ Perceptual Control Theory (that every living being is an aggregation of thousands of little control systems interconnected for the purpose of achieving prosperous survival), then the results make sense. It’s simply that people in the higher ranks have more “control” over their environment than those below them.
Of course, take this post (along with all other BD00 posts) with a carafe of salt. He likes to make up stuff that confirms his UCB by carefully stitching together corroborating evidence while filtering out all disconfirmatory evidence. But wait! You do that too, no?
Every man, wherever he goes, is encompassed by a cloud of comforting convictions, which move with him like flies on a summer day. – Bertrand Russell
Extrapolation, Abstraction, Modeling
In the beginning of his book, “Behavior: The Control Of Perception“, Bill Powers asserts that there are three ways of formulating a predictive theory of behavior: extrapolation, abstraction, and modeling.
Extrapolation and abstraction are premised on accumulating a collection observations of behaviors and ferreting out recurring patterns applicable under many contexts and input situations. Modeling goes one level deeper and is based on formulating an organizational structure of the internal mechanisms that cause the observed behaviors.

For 30 years prior to the discovery/development/refinement of control theory (and continuing on today because of entrenched mindsets), psychologists and sociologists formulated theories of behavior based on extrapolation and abstraction. Because the human nervous system and brain were (and still are) unfathomably complex, they didn’t even try to model any underlying mechanisms. They treated organisms as dumb-ass, purposeless, “black box” responders to stimuli.
Bill Powers didn’t accept the superficial approaches and black box conclusions of the social “sciences” crowd. He went deeper and turned opaque-black into transparent-white with the relentless modeling and testing of his control system hypothesis of behavior:

Note that in Bill’s model, there is an internal goal that determines the response to a given “disturbance“. Thus, given the same disturbance at two different points in time, the white box model can generate different responses whereas the black box model would always generate the same response.
For example, the white box model explains anomalies like why, on the 100th test run, a mouse won’t press a button to get a food pellet as it did on the 99 previous runs. In this case, the internal goal may be to “eat until satiated“. When the internal goal is achieved, the externally observed behavior changes because the stimulus is no longer important to the mouse.
Theories based on extrapolation and abstraction are useful for predicting short term actions and trends within a certain probability, but when a physical model of the underlying mechanisms of a phenomenon is discovered, it explains a lot of anomalies unaccounted for by extrapolation/abstraction.
For a taste of Mr. Powers’ control system-based theory of behavior, download and experiment with the software provided here: Living Control Systems III.
Who am I?
Why am I here?
WTF?
Meh!
D'oh!
My BTC Address

