Archive
Please Do Not Disturb
When a control system is humming along, the gap between the desired and current states is so small that the frequency of command issuance by the Decision Maker component is essentially zero; all is well and goal attainment is on track. However, with the universe being as messy as it is, unseen and unpredictable “disturbances” can, and do, enter the system at any point of access to the structure.
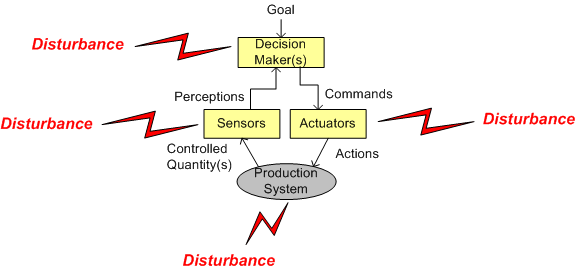
If the sensors and/or actuators can’t filter out the disturbances or are malfunctioning themselves, then true control of the production system may be lost. Perceptions and commands get distorted and the distance between goal attainment and “reality” will be perceived as shorter or longer than they are. D’oh! I hate when that happens.
Extrapolation, Abstraction, Modeling
In the beginning of his book, “Behavior: The Control Of Perception“, Bill Powers asserts that there are three ways of formulating a predictive theory of behavior: extrapolation, abstraction, and modeling.
Extrapolation and abstraction are premised on accumulating a collection observations of behaviors and ferreting out recurring patterns applicable under many contexts and input situations. Modeling goes one level deeper and is based on formulating an organizational structure of the internal mechanisms that cause the observed behaviors.

For 30 years prior to the discovery/development/refinement of control theory (and continuing on today because of entrenched mindsets), psychologists and sociologists formulated theories of behavior based on extrapolation and abstraction. Because the human nervous system and brain were (and still are) unfathomably complex, they didn’t even try to model any underlying mechanisms. They treated organisms as dumb-ass, purposeless, “black box” responders to stimuli.
Bill Powers didn’t accept the superficial approaches and black box conclusions of the social “sciences” crowd. He went deeper and turned opaque-black into transparent-white with the relentless modeling and testing of his control system hypothesis of behavior:

Note that in Bill’s model, there is an internal goal that determines the response to a given “disturbance“. Thus, given the same disturbance at two different points in time, the white box model can generate different responses whereas the black box model would always generate the same response.
For example, the white box model explains anomalies like why, on the 100th test run, a mouse won’t press a button to get a food pellet as it did on the 99 previous runs. In this case, the internal goal may be to “eat until satiated“. When the internal goal is achieved, the externally observed behavior changes because the stimulus is no longer important to the mouse.
Theories based on extrapolation and abstraction are useful for predicting short term actions and trends within a certain probability, but when a physical model of the underlying mechanisms of a phenomenon is discovered, it explains a lot of anomalies unaccounted for by extrapolation/abstraction.
For a taste of Mr. Powers’ control system-based theory of behavior, download and experiment with the software provided here: Living Control Systems III.
Who am I?
Why am I here?
WTF?
Meh!
D'oh!
My BTC Address

