Archive
Signals, Sensations, Perceptions, Commands, Actions!
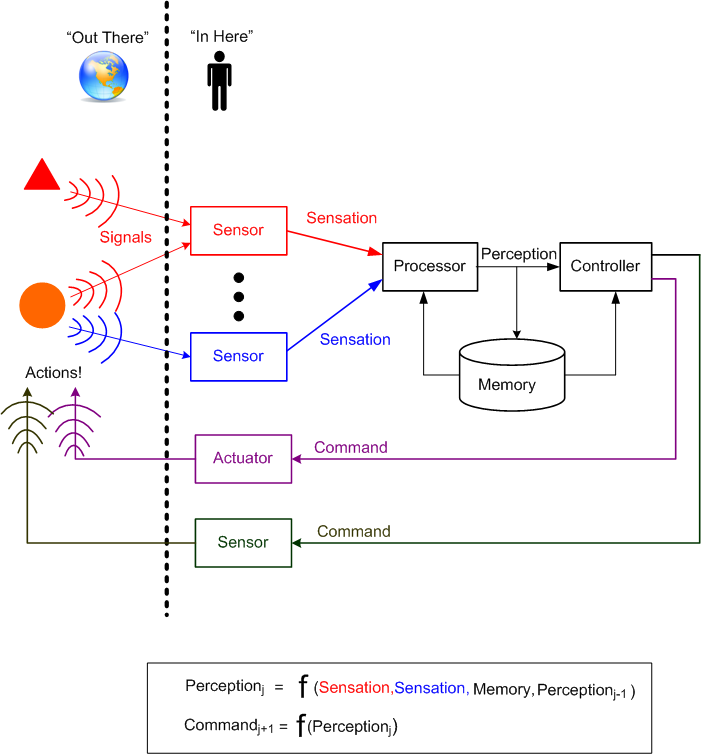
In humans, the sensors are the eyes, ears, nose, skin, and taste buds. The processor/memory/controller combo is the brain. The actuators are the muscles. Although not shown on the diagram, “commands” are also issued to the sensors. All inter-part communications “In Here” are manifested via neural currents.
Of course, this crap is all made up. It’s simply a cacophonous dump of what was in my tortured mind at the moment.
Effective, Incompetent, Coercive, Klueless
In any control system design, the accuracy of its input sensors, the force of its output actuators, the ability of its controllers to decide whether the system’s goals are being met, and the responsiveness (time lag) of all three of its parts determine its performance.
However, that’s not enough. All of the control system’s sensors and actuators must be actually interfaced to the controlled system in order for the controller + controllee supra-system to have any chance at meeting the goal supplied to (or by) the controller.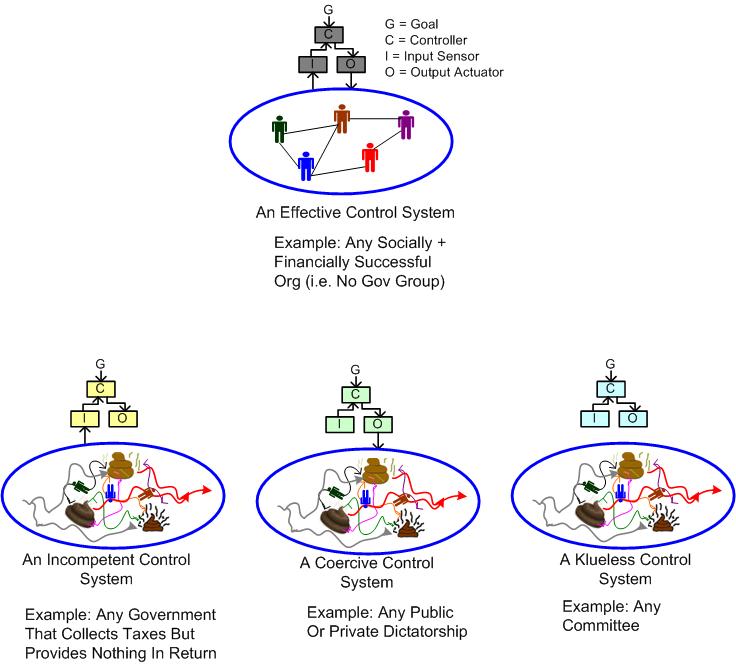
Fixed Vs Variable Sleep Times
Consider the back end of a sensor system as shown below. Now, assume that you’re tasked with building the Sample Processor and you need some way of testing it. Thus, you need to simulate the continuous high speed sample stream that the Sensor will produce during operation in the real physical world.

Since the analog real world is wonderfully messy and non-deterministic, the sensor/probe combo will produce data sample detections in bursty clumps as modeled below.

However, since you don’t need the high fidelity and fine grained controllability in your sensor simulator implied by the figure, you simplify your approach by modeling the sensor output as a deterministically time sliced (slice size = T) and “batched” device as shown by the yellow boxes in the diagram below.
 After thinking about it, you sketch out a simple core sensor simulation algorithm as:
After thinking about it, you sketch out a simple core sensor simulation algorithm as:

As the figure below shows, there are two options for determining how long to “sleep” after each yellow sample batch has been generated and transmitted: fixed and variable. In the simpler approach, the code sleeps for a fixed time duration “T” after every batch – regardless of how long it took to generate and transmit the batch of sensor samples. In the higher fidelity variable sleep approach, the time to sleep is calculated on the fly during runtime as the slice time “T” minus the time it took to generate and send the current batch. As the batch processing time approaches the time slice period T, the software sleeps less in order to maintain true real-time operation.

As the figure shows, implementing the sensor simulator with variable sleep time logic results in truer real-time behavior. In the fixed sleep design, the simulator starts lagging behind real-time immediately and the longer the sensor simulator runs, the further its behavior deviates from the real-time ideal. However, for short simulator runs and/or large relative time slice periods (see the box above), the simpler fixed sleep time approach tracks real-time just about as well.
For the project I’m currently working on, I’ve coded up a sensor simulator and sample processor pair that can be configured either way. I just thought I’d share the analysis/design thought process that I went through just in case it might interest or help anybody who’s working on something similar.
Surveillance Systems
The purpose of a surveillance system is to detect and track Objects Of Interest (OOI) that are present within a spatial volume covered by a sensing device. Surveillance systems can be classified into four types:
- Cooperative and synchronized
- Cooperative and unsynchronized
- Un-cooperative and active
- Un-cooperative and passive
In cooperative systems, the OOI are equipped with a transponder device that voluntarily “cooperates” with the sensor. The sensor continuously probes the surveillance volume by transmitting an interrogation signal that is recognized by the OOI transponders. When a transponder detects an interrogation, it transmits a response signal back to the interrogator. The response may contain identification and other information of interest to the interrogator. Air traffic control radar systems are examples of cooperative, synchronized surveillance systems.

In a cooperative and unsynchronized surveillance system, the sensor doesn’t actively probe the surveillance volume. It passively waits for signal emissions from beacon-equipped OOI. Cooperative and unsynchronized surveillance systems are less costly than cooperative and synchronized systems, but because the OOI beacon emissions aren’t synchronized by an interrogator, their signals can garble each other and make it difficult for the sensor detector to keep them separated.

In uncooperative surveillance systems, the OOI aren’t equipped with any man made devices designated to work in conjunction with a remotely located sensor. The OOI are usually trying to evade detection and/or the sensor is trying to detect the OOI without letting the OOI know that they are under surveillance.
In an active, uncooperative surveillance system, the sensor’s radiated signal is specially designed to reflect off of an OOI. The time of detection of the reflected signal can be used to determine the position and speed of an OOI. Military radar and sonar equipment are good examples of uncooperative surveillance systems.

In a passive, uncooperative surveillance system, the sensor is designed to detect some type of energy signal (e.g. heat, radioactivity, sound) that is naturally emitted or reflected (e.g. light) by an OOI. Since there is no man made transmitter device in the system design, the detection range, and hence coverage volume, is much smaller than any of the other types of surveillance systems.

The dorky classification system presented in this blarticle is by no means formal, or official, or standardized. I just made it up out of the blue, so don’t believe a word that I said.
Who am I?
Why am I here?
WTF?
Meh!
D'oh!
My BTC Address

