Archive
Abstracting Away Some Details
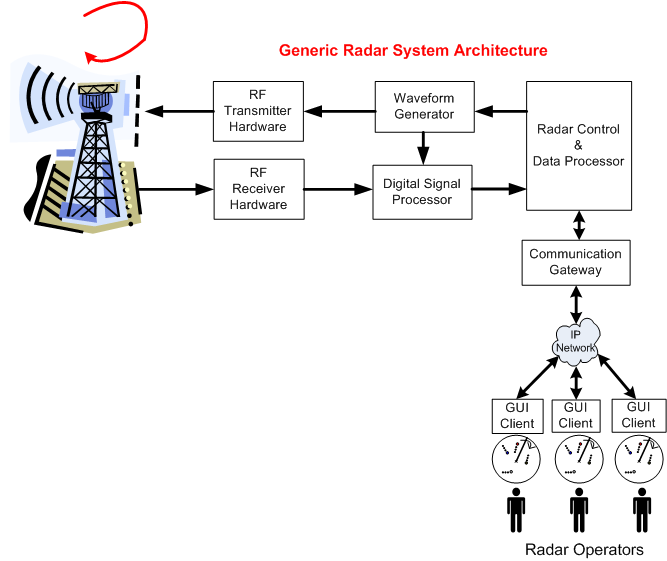
The following figure shows the general system architecture of a rotating, ground-based, radar whose mission is to detect and track “air breathing” targets. The chain of specially designed hardware and software subsystems provides radar operators with a 360 degree, real-time, surveillance picture of all the targets that fall within the physical range and elevation coverage capabilities of the Antenna and Transmit/Receive subsystems.
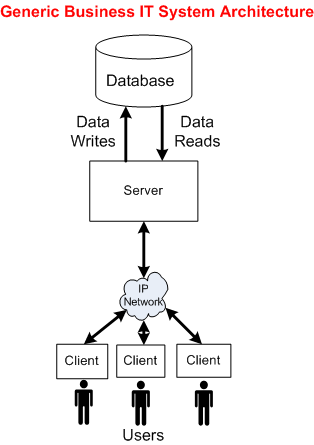
The following picture shows the general architecture of a business IT system. Unlike the specialized radar system architecture, this generic IT structure supports a wide range of application domains: insurance, banking, e-commerce, social media, etc.
To explore the technical similarities/differences between the two platforms, let’s abstract away the details of everything to the left of the Radar Control & Data Processor and stuff them into a box called “Radar Hardware“. We’ll also tuck away the radar’s Communication Gateway functionality by placing it inside the Radar Control & Data Processor:
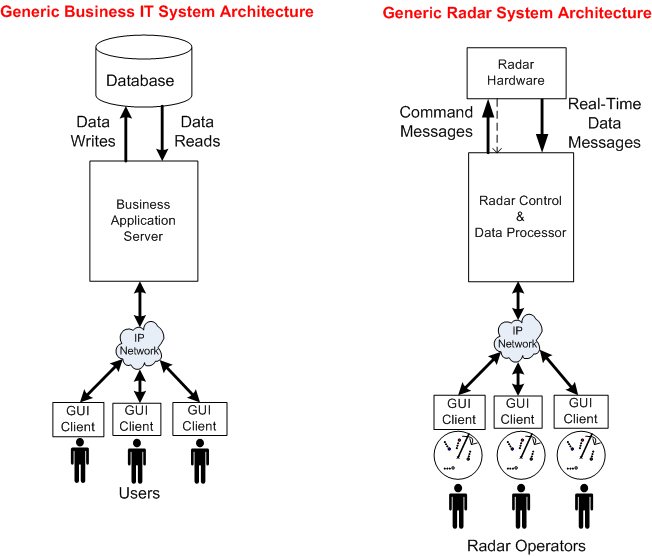
Now that we’ve used the power of abstraction to wrestle the original radar system architecture into a form similar to a business IT system, we can reason about some of the differences between the two structures.
Actually, I’m gonna stop here and leave the analysis of the technical similarities and differences as a thought experiment to you, dear reader. That’s because this is one of those posts that took me for freakin’ ever to write. I must have iterated over the draft at least 20 times during the past month. And of course, I had no master plan when I started writing it, so I hope you at least enjoy the pretty pictures.
A Blast From The Past
One of the first from-scratch products I ever worked on was named “BEXR” (Beacon Extractor & Recorder, pronounced “Beck’s-uhr“). I proposed the name BEVR (Beacon Evaluation & Video Recorder, pronounced “beaver“), but it was shot down by the marketing department immediately for who knows why 🙂
BEXR was a custom hardware and software combo that connected to the raw, low-level, return signals received by FAA secondary surveillance radars from aircraft-based transponders. The product allowed FAA maintenance personnel to observe and evaluate the quality of radar and transponder signals in real-time – much like a specialized oscilloscope. In addition, it supported recording and playback capabilities for off-site analysis.
Despite it’s utility to the FAA, BEXR was politically controversial. Since non-conforming aircraft transponders were relatively expensive to fix and reinstall, owners of small aircraft did not like being “spied upon“. They did not want to know if their equipment was out-of-spec. Thus, BEXR’s mission was limited to troubleshooting only radar issues.
BEXR was comprised of two, custom-designed, 16 bit, PC-AT bus cards. They were packaged in a portable PC that was carted to/from the radar site under investigation. I was the BEXR product manager and the GUI developer. I wrote the GUI Operator Control Software (OCS) in C using Microsoft’s Quick C IDE. The software directly used the Windows 3.1 C APIs to display application-specific windows, dialog boxes, target positions, and control buttons/lists. Compared to today’s GUI tools/API’s, it was the equivalent of writing assembler code for GUIs, but I had a lot of fun writing it. 🙂
The reason I decided to write this post is because I recently ran across a pack of sticky cards that we used to market the product and hand out at trade shows. It was a blast from the past….
Stuck And Bother
I’m currently working on a project with a real, hard deadline. My team has to demonstrate a working, multi-million dollar radar in the near future to a potential deep-pocketed customer. As you can see below, the tower is up and the antenna is majestically perched on its pedestal. However, it ain’t spinning yet. Nor is it radiating energy, detecting signal returns, or extracting/estimating target information (range, speed, angle, size) buried in a mess of clutter and noise. But of course, we’re integrating the hardware and software and progressing toward the goal.

Lest you think otherwise, I’m no Ed Snowden and those pics aren’t classified. If you’re a radar nerd, you can even get this particular radar emblazoned on a god-awful t-shirt (like I did) from zazzle.com:

OK, enough of this bulldozarian levity. Let’s get serious again – oooh!
As a hard deadline approaches on a project, a perplexing question always comes to my mind:
How much time should I spend helping others who get “stuck“, versus getting the code I am responsible for writing done in time for the demo? And conversely, when I get stuck, how often should I “bother” someone who’s trying to get her own work done on time?
Of course, if you’re doing “agile“, situations like this never happen. In fact, I haven’t ever seen or heard a single agile big-wig address this thorny social issue. But reality being what it is, situations like this do indeed happen. I speculate that they happen more often than not – regardless of which methodology, practices, or tools you’re using. In fact, “agile” has the potential to amplify the dilemma by triggering the issue to surface on a per sprint basis.
Save for the psychopaths among us, we all want to be altruistic simply because it’s the culturally right thing to do. But each one of us, although we’re sometimes loathe to admit it, has been endowed by mother nature with “the selfish gene“. We want to serve ourselves and our families first. In addition, the situation is exacerbated by the fact that the vast majority of organizations unthinkingly have dumb-ass recognition and reward systems in place that celebrate individual performance over team performance – all the while assuming that the latter is a natural consequence of the former. Life can be a be-otch, no?
Someone Broke My Radar!
D’oh! Someone broke my freakin’ radar! When I went to bed last night and glanced out my window, it was happily spinning away in my backyard diligently searching for airborne intruders. When I woke up, it was all in pieces.
After dragging the heap of parts into my garage, I snapped this pic of the atrocity:

Damn, I gotta find the culprit who did this. If you have any information regarding this grave injustice, either call 1-800-BD00 or post your evidence in the comments section. There’s a brand new bulldozer00.com T-shirt waiting in the wings for the person who provides the information that leads to the capture and conviction of the perpetrator(s).
Big Design, But Not All Upfront
When not ranting and raving on this blawg about “great injustices” (LOL) that I perceive are keeping the world from becoming a better place, I design, write, and test real-time radar system software for a living. I use the UML before, during, and after coding to capture, expose, and reason about my software designs. The UML artifacts I concoct serve as a high level coding road map for me; and a communication tool for subject matter experts (in my case, radar system engineers) who don’t know how to (or care to) read C++ code but are keenly interested in how I map their domain-specific requirements/designs into an implementable software design.
I’m not a UML language lawyer and I never intend to be one. Luckily, I’m not forced to use a formal UML-centric tool to generate/evolve my “bent” UML designs (see what I mean by “bent” UML here: Bend It Like Fowler). I simply use MSFT Visio to freely splat symbols and connections on an e-canvas in any way I see fit. Thus, I’m unencumbered by a nanny tool telling me I’m syntactically/semantically “wrong!” and rudely interrupting my thought flow every five minutes.
The 2nd graphic below illustrates an example of one of my typical class diagrams. It models a small, logically cohesive cluster of cooperating classes that represent the “transmit timeline” functionality embedded within a larger “scheduler” component. The scheduler component itself is embedded within yet another, larger scale component composed of a complex amalgam of cooperating hardware and software components; the radar itself.
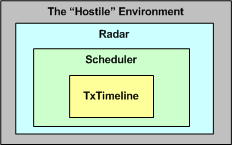
When fully developed and tested, the radar will be fielded within a hostile environment where it will (hopefully) perform its noble mission of detecting and tracking aircraft in the midst of random noise, unwanted clutter reflections, cleverly uncooperative “enemy” pilots, and atmospheric attenuation/distortion. But I digress, so let me get back to the original intent of this post, which I think has something to do with how and why I use the UML.
The radar transmit timeline is where other necessarily closely coupled scheduler sub-components add/insert commands that tell the radar hardware what to do and when to do it; sometime in the future relative to “now“. As the radar rotates and fires its sophisticated, radio frequency pulse trains out into the ether looking for targets, the scheduler is always “thinking” a few steps ahead of where the antenna beam is currently pointing. The scheduler relentlessly fills the TxTimeline in real time with beam-specific commands. It issues those commands to the hardware early enough for the hardware to be able to queue, setup, and execute the minute transmit details when the antenna arrives at the desired command point. Geeze! I’m digressing yet again off the UML path, so lemme try once more to get back to what I originally wanted to ramble about.
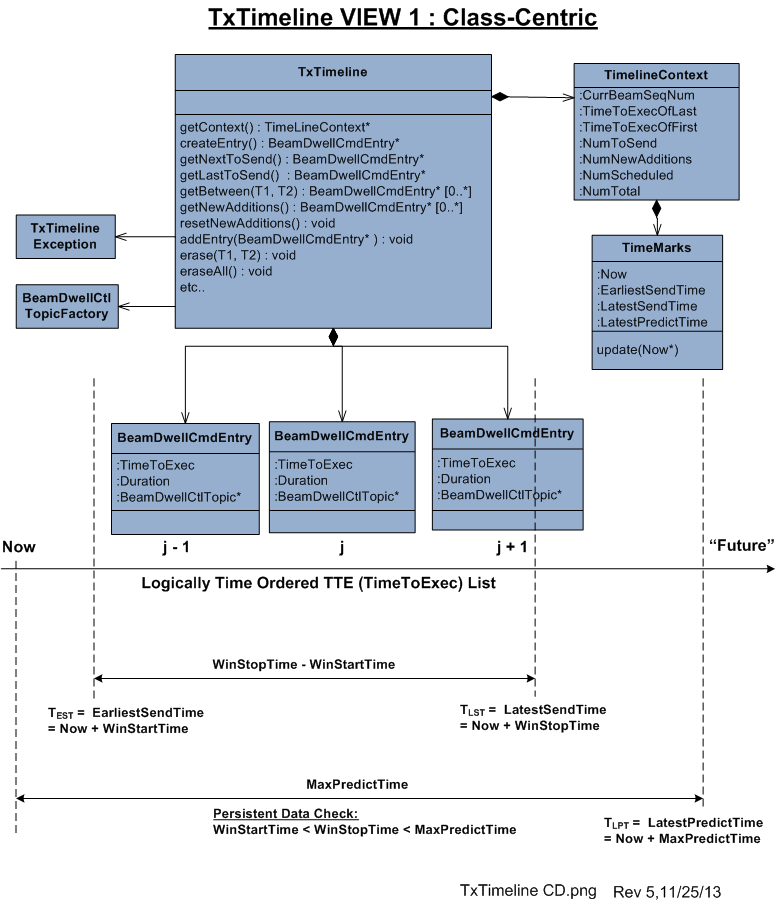
Being an unapologetic UML bender, and not a fan of analysis-paralysis, I never attempt to meticulously show every class attribute, operation, or association on a design diagram. I weave in non-UML symbology as I see fit and I show only those elements I deem important for creating a shared understanding between myself and other interested parties. After all, some low level attributes/operations/classes/associations will “go away” as my learning unfolds and others will “emerge” during coding anyway, so why waste the time?
Notice the “revision number” in the lower right hand corner of the above class diagram. It hints that I continuously keep the diagram in sync with the code as I write it. In fact, I keep the applicable diagram(s) open right next to my code editor as I hack away. As a PAYGO practitioner, I bounce back and forth between code & UML artifacts whenever I want to.
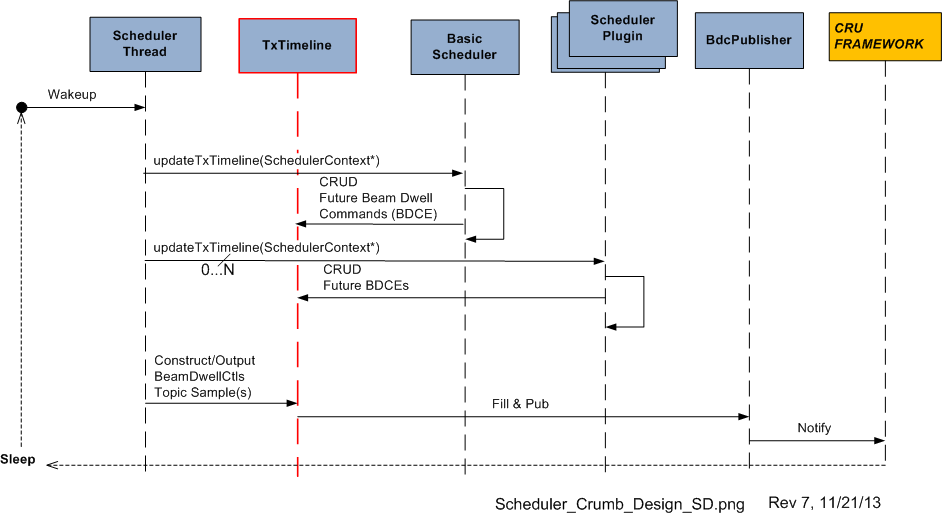
The UML sequence diagram below depicts a visualization of the participatory role of the TxTimeline object in a larger system context comprised of other peer objects within the scheduler. For fear of unethically disclosing intellectual property, I’m not gonna walk through a textual explanation of the operational behavior of the scheduler component as “a whole“. The purpose of presenting the sequence diagram is simply to show you a real case example that “one diagram is not enough” for me to capture the design of any software component containing a substantial amount of “essential complexity“. As a matter of fact, at this current moment in time, I have generated a set of 7+ leveled and balanced class/sequence/activity diagrams to steer my coding effort. I always start coding/testing with class skeletons and I iteratively add muscles/tendons/ligaments/organs to the Frankensteinian beast over time.
In this post, I opened up my trench coat and showed you my… attempted to share with you an intimate glimpse into the way I personally design & develop software. In my process, the design is not done “all upfront“, but a purely subjective mix of mostly high and low level details is indeed created upfront. I think of it as “Big Design, But Not All Upfront“.
Despite what some code-centric, design-agnostic, software development processes advocate, in my mind, it’s not just about the code. The code is simply the lowest level, most concrete, model of the solution. The practices of design generation/capture and code slinging/testing in my world are intimately and inextricably coupled. I’m not smart enough to go directly to code from a user story, a one-liner work backlog entry, a whiteboard doodle, or a set of casual, undocumented, face-to-face conversations. In my domain, real-time surveillance radar systems, expressing and capturing a fair amount of formal detail is (rightly) required up front. So, screw you to any and all NoUML, no-documentation, jihadists who happen to stumble upon this post. 🙂
The Right Tool For The Job
The figure below depicts a scenario where two targets are just about to penetrate the air space covered by a surveillance radar.
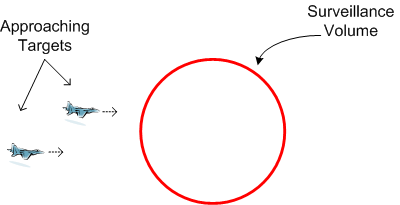
The next sequence of snapshots illustrates the targets entering, traversing, and exiting the coverage volume.
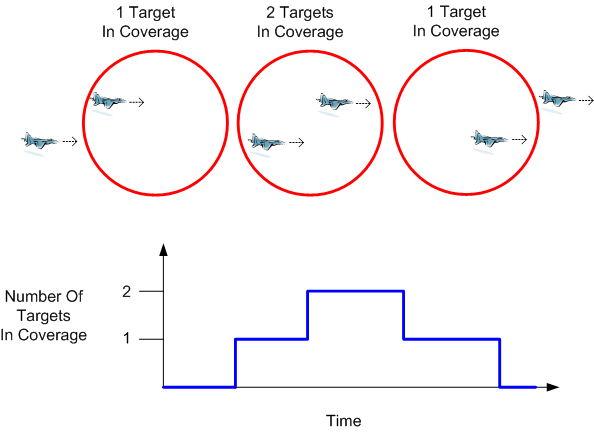
Assume that the surveillance volume is represented in software as a dynamically changing, in-memory database of target objects. On system startup, the database is initialized as empty. During operation, targets are inserted, updated, and deleted in response to changes that occur in the “real” world.
The figure below models each target’s behavior as a state transition diagram (STD). The point to note is that a target in a radar application is stateful and mutable. Regardless of what functional language purists say about statefulness and mutability being evil, they occur naturally in the radar application domain.
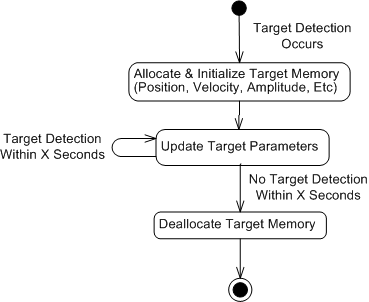
Note that the STD also indicates that the application domain requires garbage collection (GC) in the form of deallocation of target memory when a detection hasn’t been received within X seconds of the target’s prior update.
Since the system must operate in real-time to be useful, we’d prefer that the target memory be deleted as soon as the real target it represents exits the surveillance volume. We’d prefer the GC to be under the direct, local, control of the programmer and not according to the whims of an underlying, centralized, virtual machine whose GC kicks it whenever it feels like it.
With these domain-specific attributes in mind, C++ seems like the best programming language fit for real-time radar domain applications. The right tool for the job, no? If you disagree, please state your case.
Who am I?
Why am I here?
WTF?
Meh!
D'oh!
My BTC Address

